
Theory and Practice of Quantitative Assessment of System Harmonicity: Case of Road Safety in Russia before and during the COVID-19 Epidemic


Abstract
:1. Introduction
2. Related Works
2.1. Synergetics, Orderliness and System Harmonicity
- a—dominant;
- b—subdominant.
2.2. Road Safety Is a System Property. Road Safety as a Result of Functioning of a Specialized System for Preventing Conflict Road Traffic Situations
2.3. General Trends of Road Safety Changes
2.4. Factors Influencing Road Safety
2.4.1. The Road User Factor
2.4.2. The Factor of Road Transport Infrastructure and Traffic Control Systems
2.4.3. The Factors of the Technical Level and Quality of the Vehicle
2.4.4. The Factors of the External Environment That Negatively Affect Traffic Conditions
2.5. COVID Lockdown and Its Influence on Road Safety
3. Theoretical Solution to the Problem of Assessing Systemic Harmonicity
3.1. Identification of the Concept of “Reference Systems”
- they work in the mode of generalized golden ration (GGR) [29];
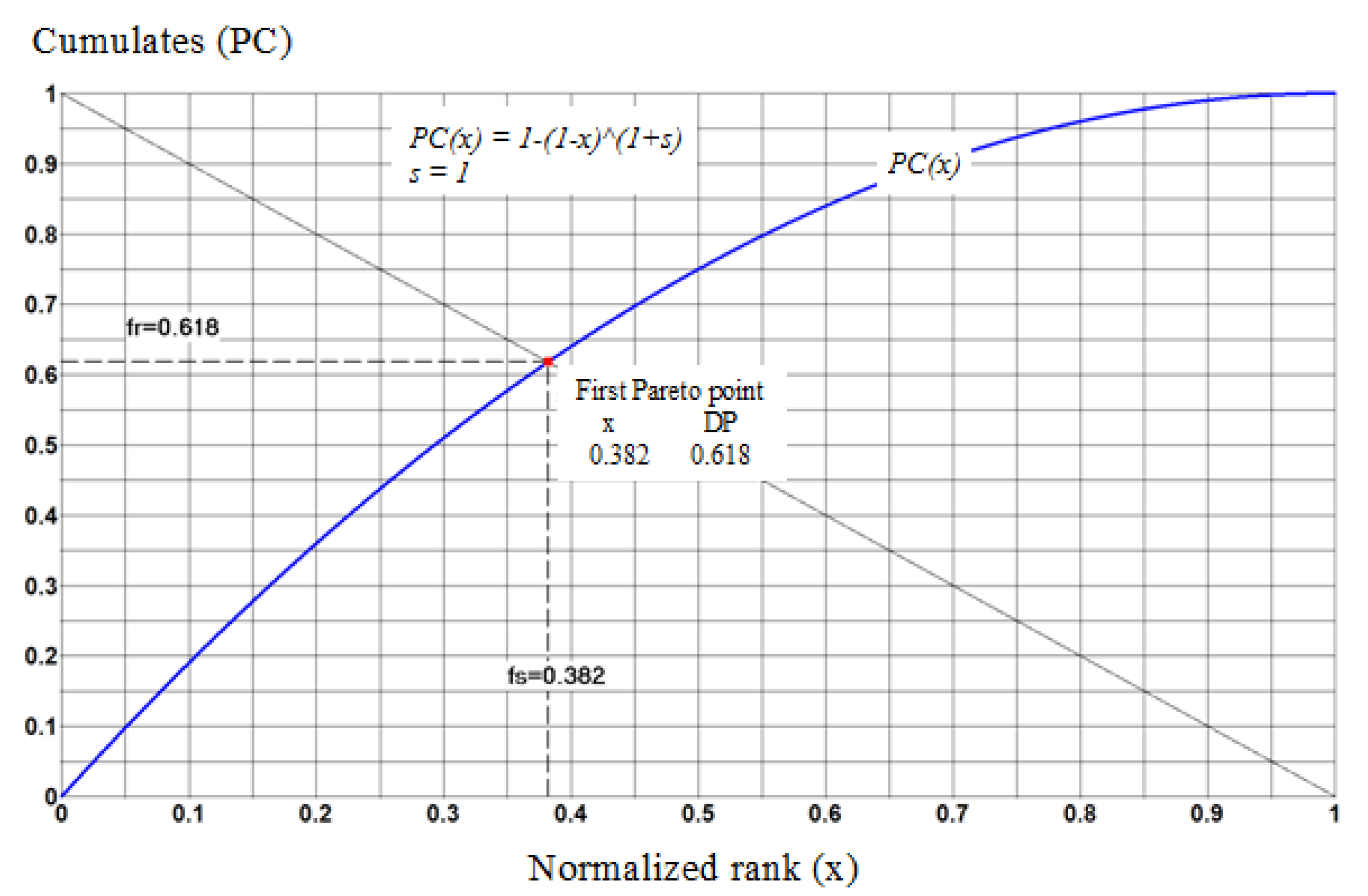
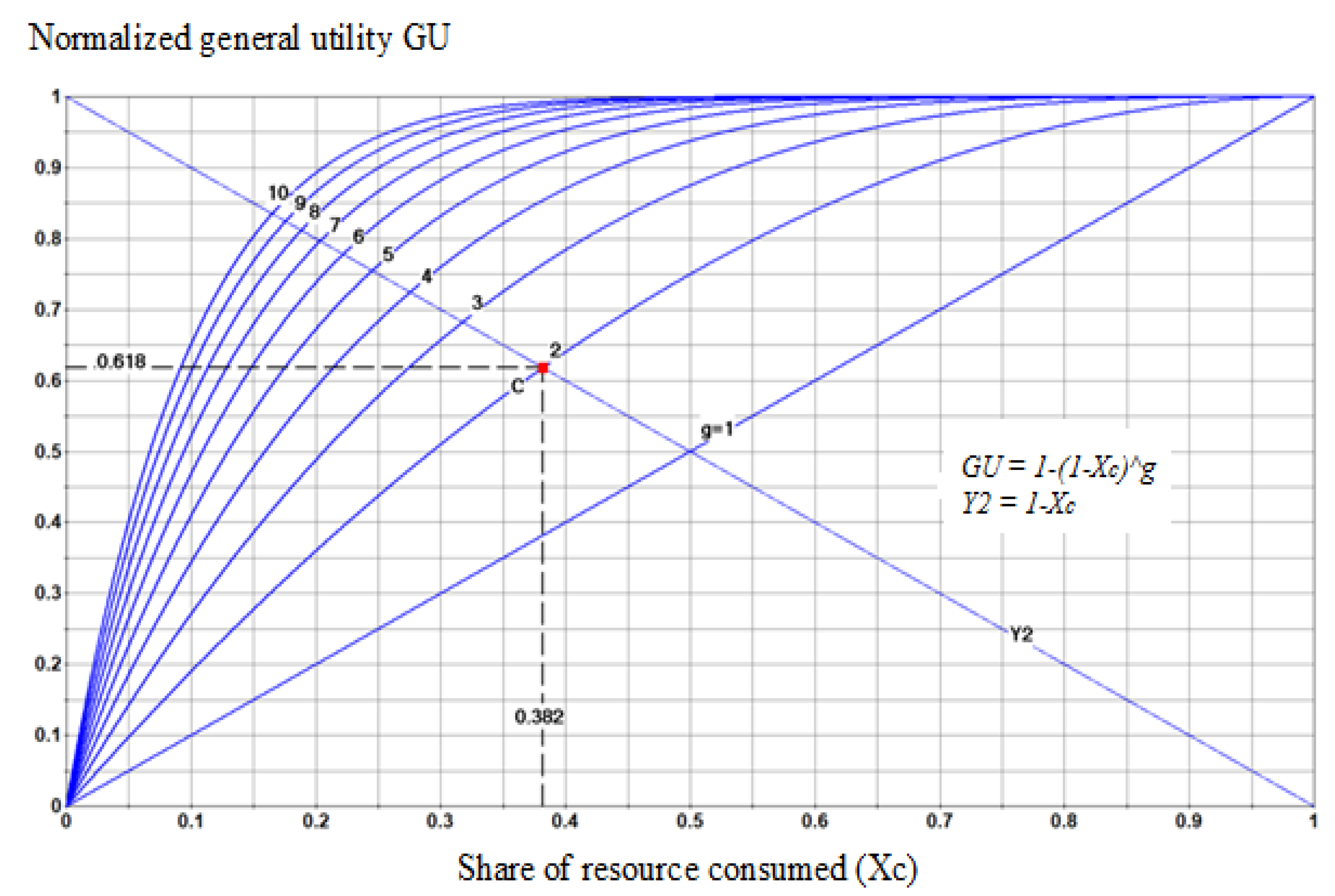
- their normalized utility function is described by the Equation (3):where
- GU— the normalized general utility;
- x—the share of consumed resource;
- g = 1 + s—Q-factor-system quality indicator;
- s—the multiplicity parameter, independent of x.
- they have real (independent of argument x) values of the quality factor g.
3.2. Functionality of Reference System
3.3. Analysis of the Dynamic Characteristics of Reference Systems’ Functionality
- -
- speed of the change of process utility SGU (speed of general utility):
- -
- process utility GU (general utility):
- -
- vital power (performance) of process VP (vital power):
- -
- reserve of process vital power S (stamina):
3.4. The Research of the Structural Features of Utility Function of System Management
- the general utility GU of a complex system is an additive composition of individual functions of utility of system components;
- the general utility GU of urban mobility management is a consequence of interaction between chaotic state and orderliness of processes in this sphere.
- x—normalized rank; x = ri/rmax;
- ri and rmax—correspondingly current and maximal ranks;
- —Q-factor-system quality indicator;
- g and s—indicators.
- -
- -
- representation of utility function GU(x) in additive form (26):where
- —an individual utility function (the share of contribution of i-component to the final system result).
- —dominant;
- —subdominant;
- —Q-factor-system quality indicator
- g and s—indicators.
- on the one hand, a low value of the indicator g indicates a low system efficiency and, as a consequence, it is related to unwanted losses Z1;
- on the other hand, a growth of the value g is impossible withoud additional expenses Z2.
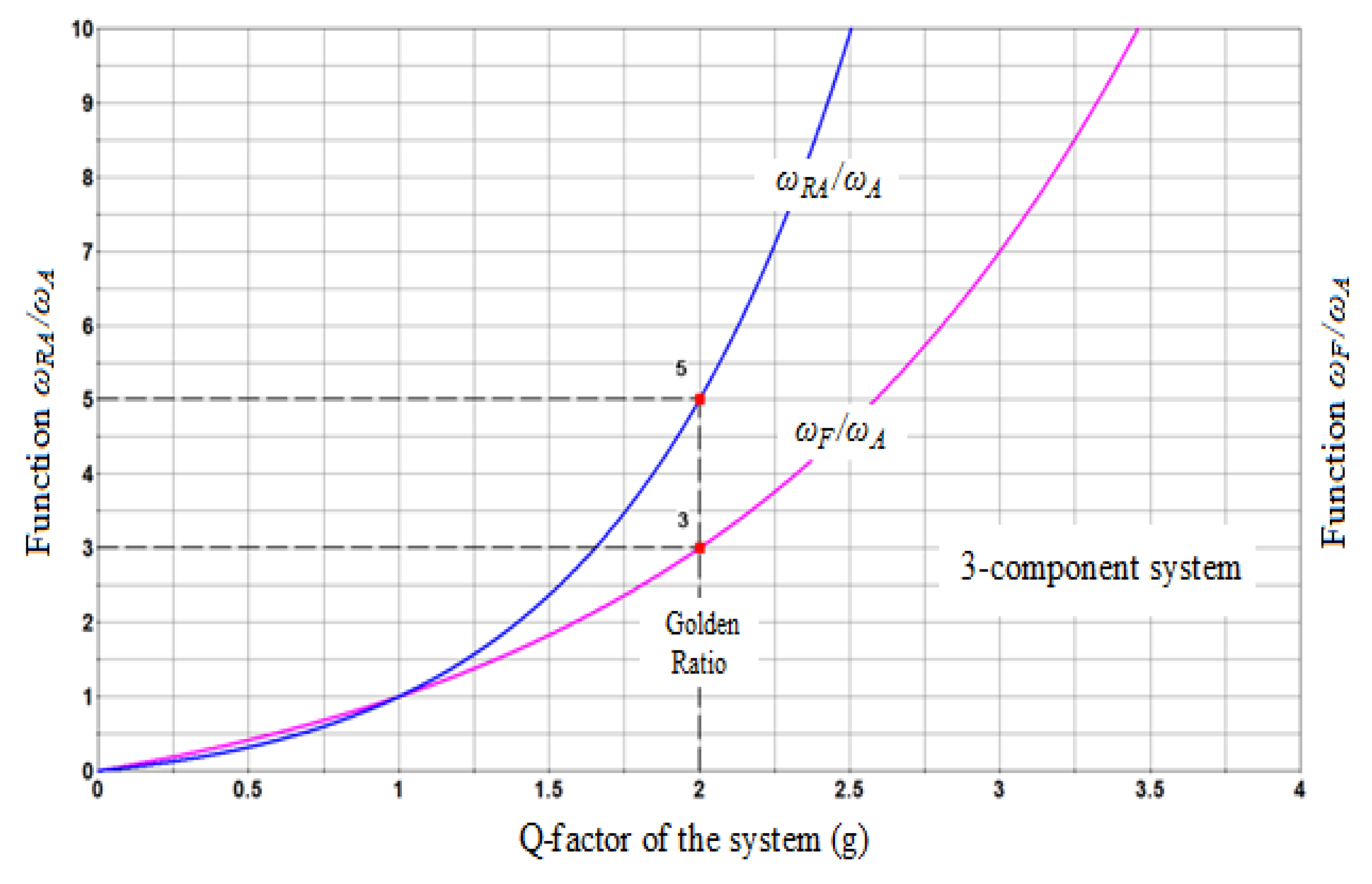
3.5. Establishment of the Relation between Functionality and Structure
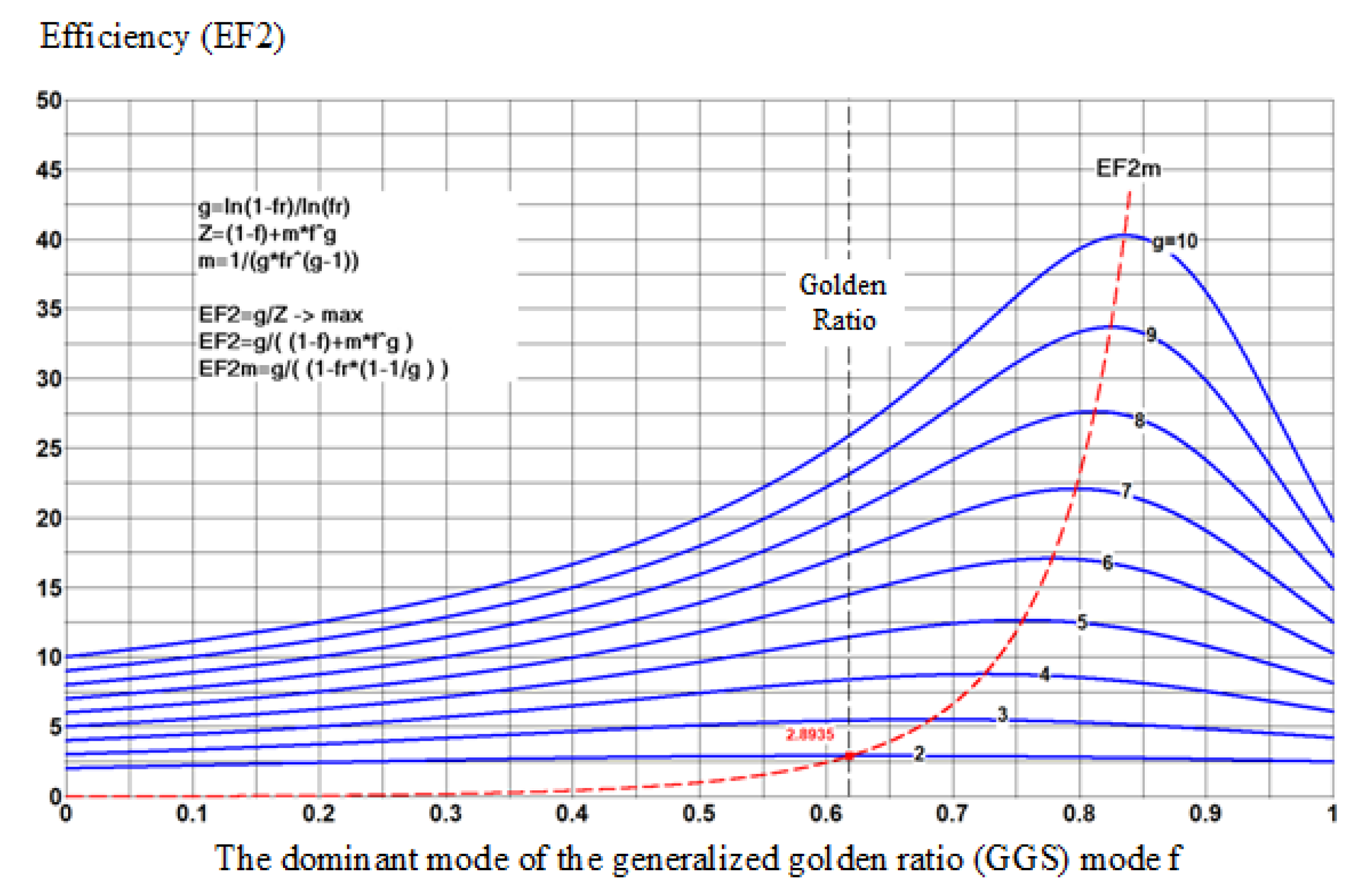
3.6. Identification of Model of Evaluation of Reference Systems’ Efficiency
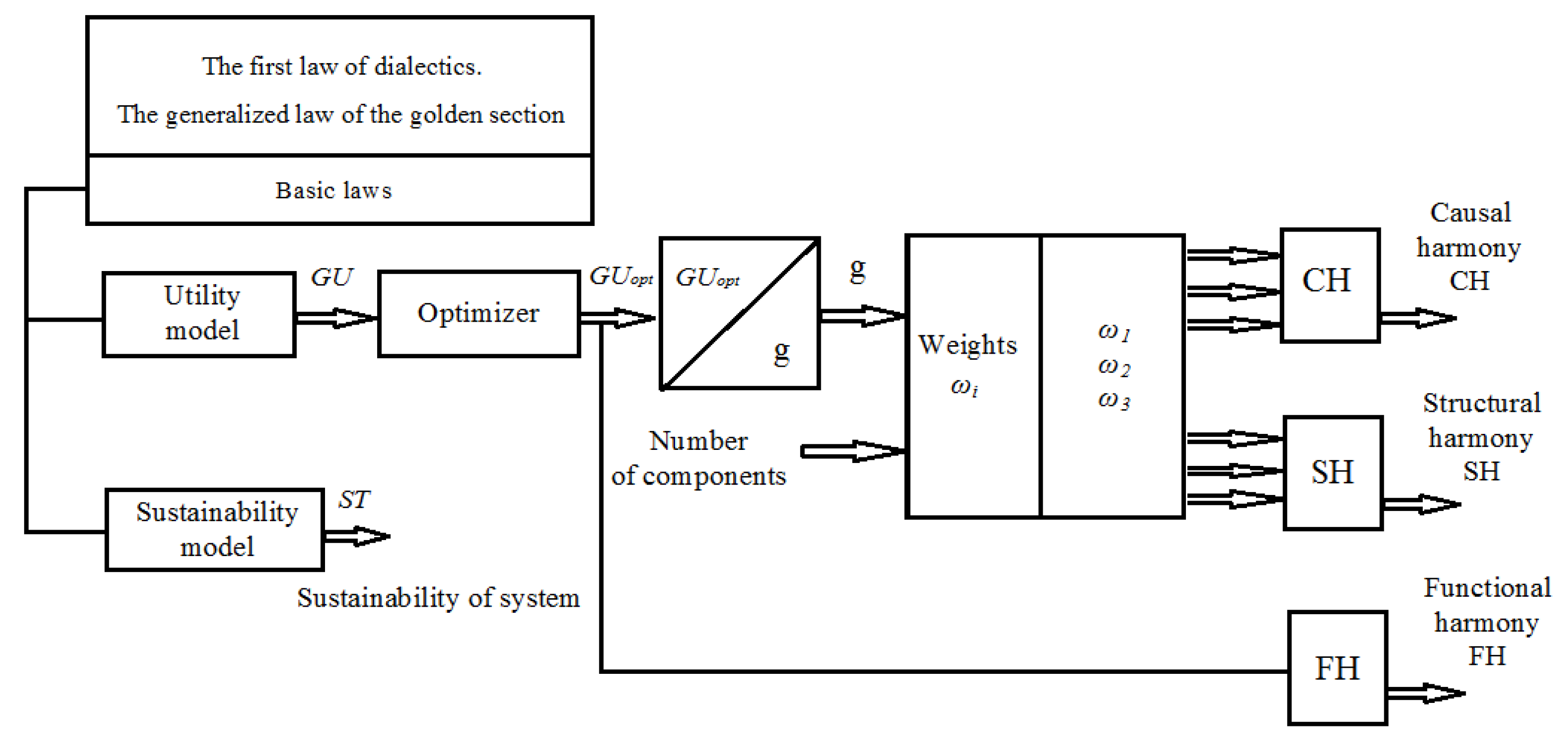
3.7. Conceptual Model of Reference System Analysis
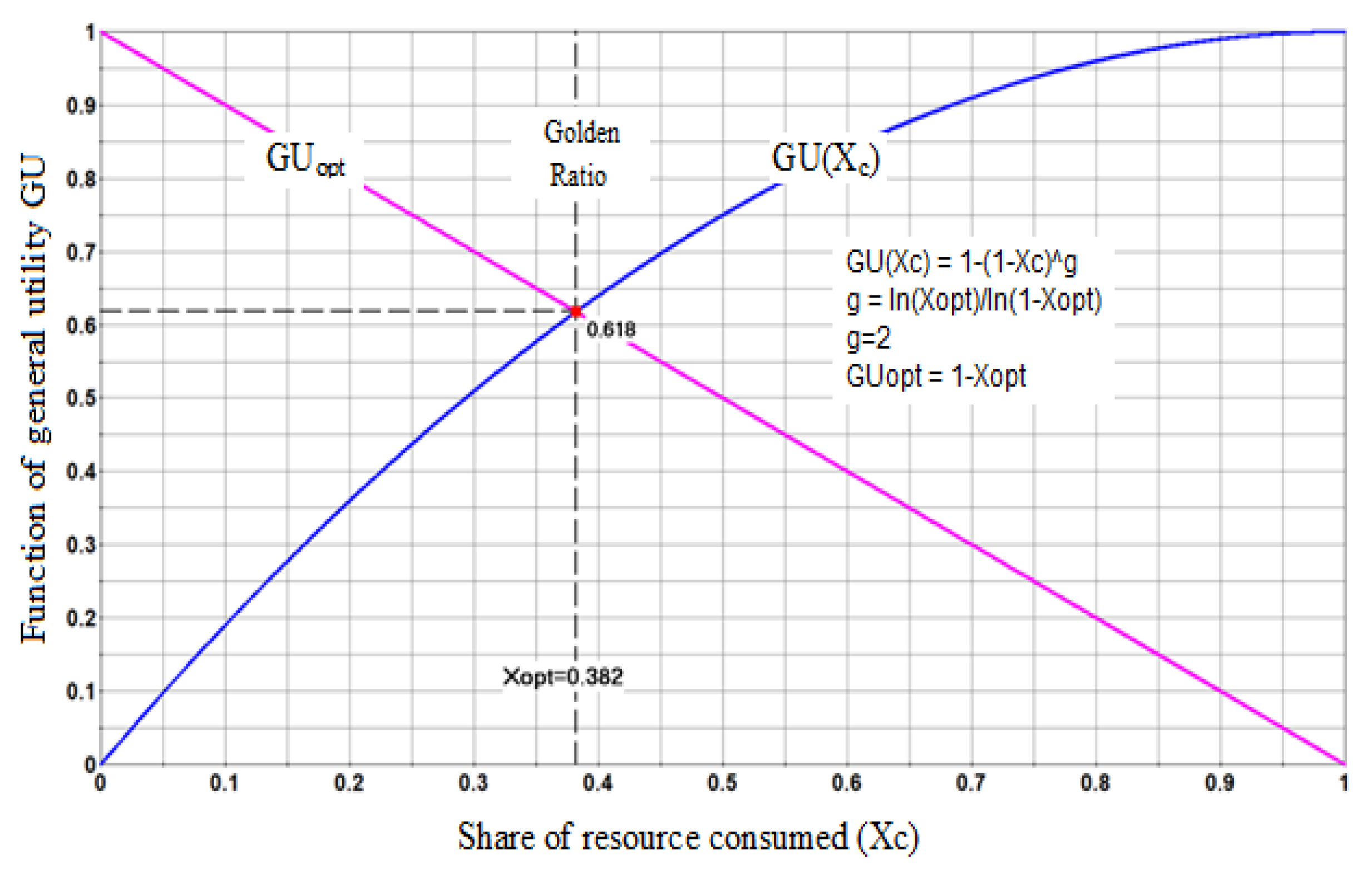
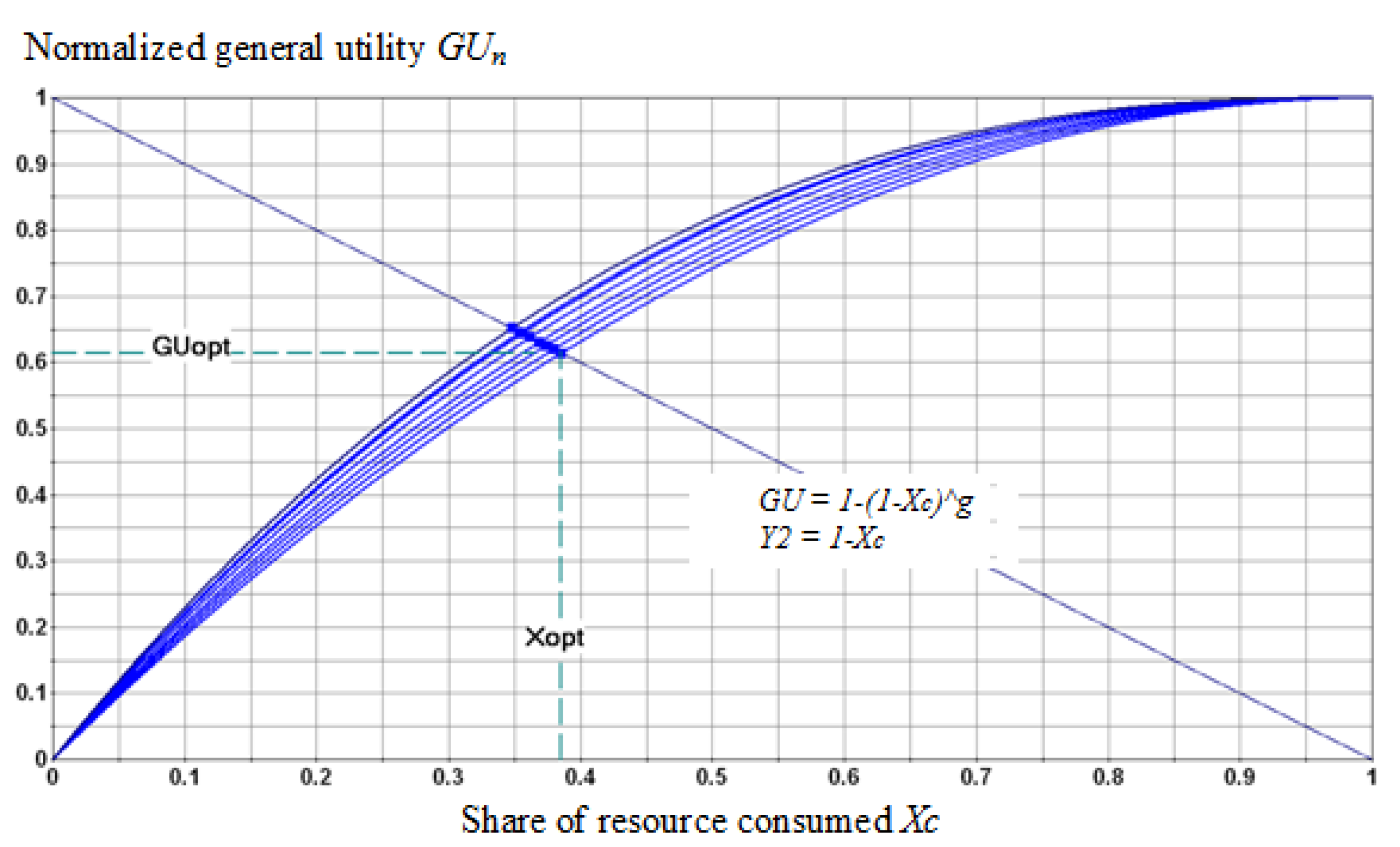
3.8. Definition of the System Utility Function
- a—dominant, a = 1 − xc;
- xc—the share of resource consumed on goal achievement;
- b—subdominant; b = 1 − GU;
- GU—the share of received utility relatively to maximal possible.
- g—Q-factor-system quality indicator.
3.9. Optimization of the Total Utility (Criteria of Optimality, System Harmonization)
- with regard to the first dialectic law, , where ; ), the next condition should be satisfied
- with regard to GGR, .Therefore, in the optimum point (where ) we havewhich implies that the quality factor equals to (40):
- -
- optimal solutions are always placed on the diagonal (42);
- -
- system quality factor in the optimum point equals to ;
- -
- work state in optimum should be considered as harmonious system state;
- -
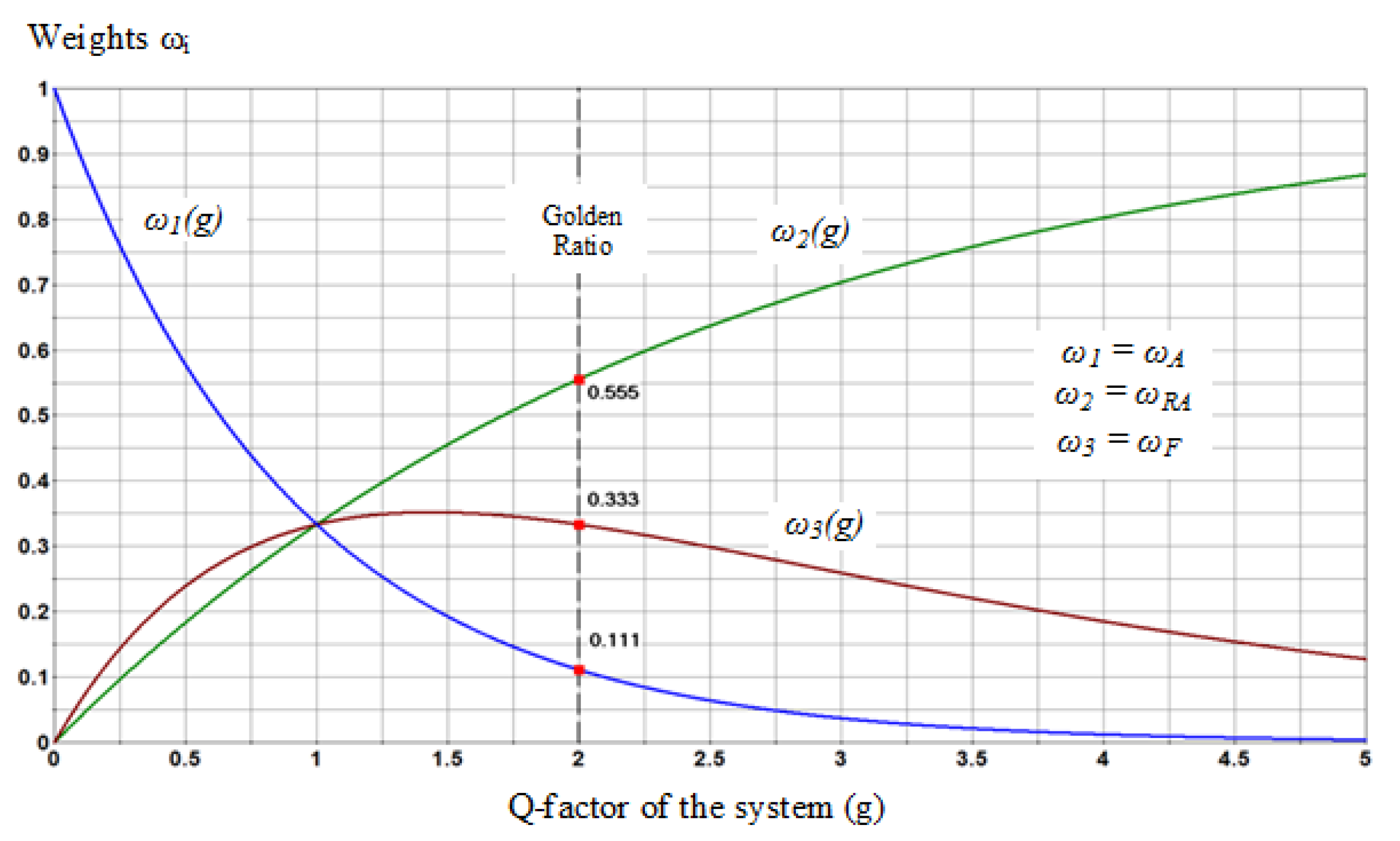
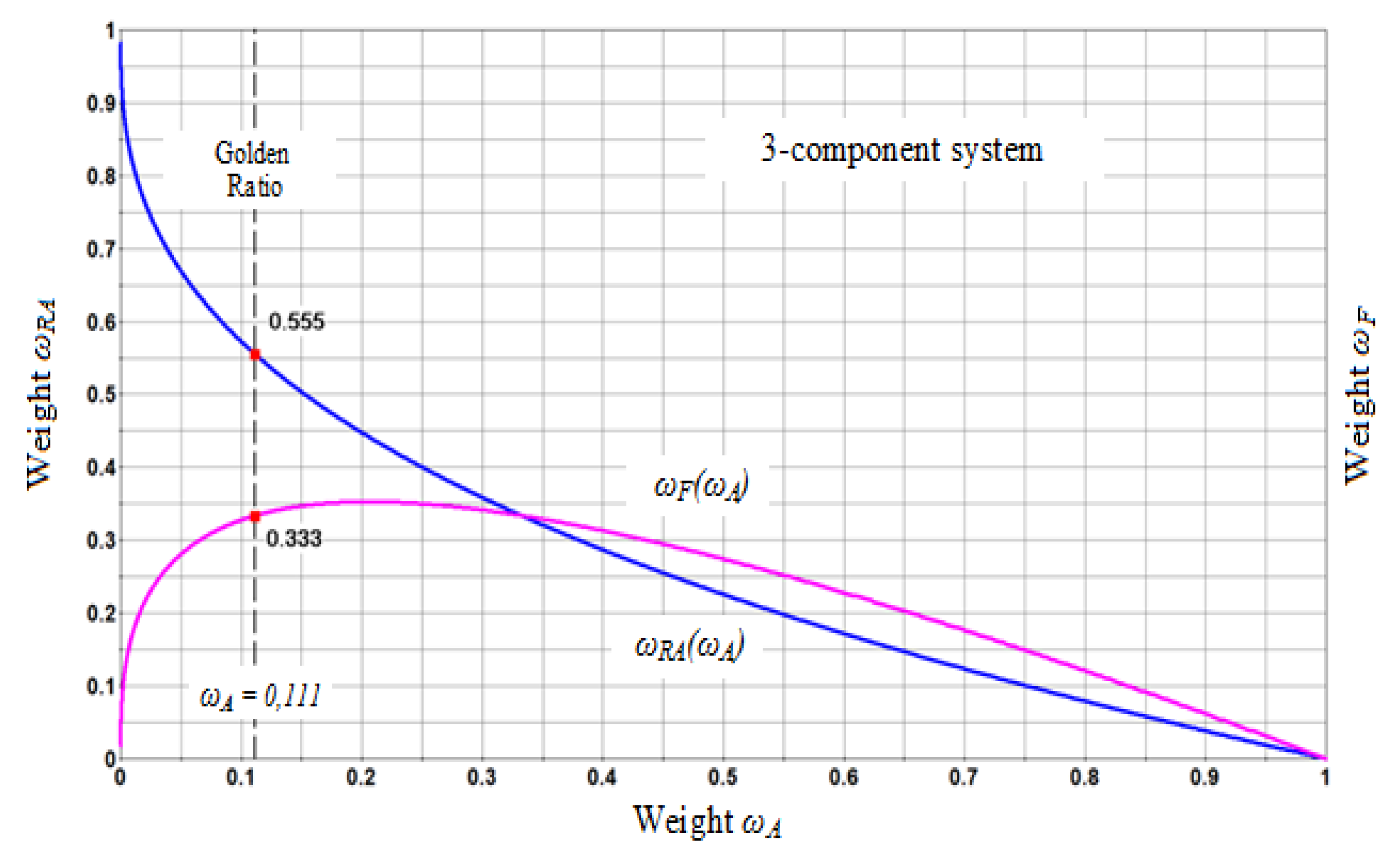
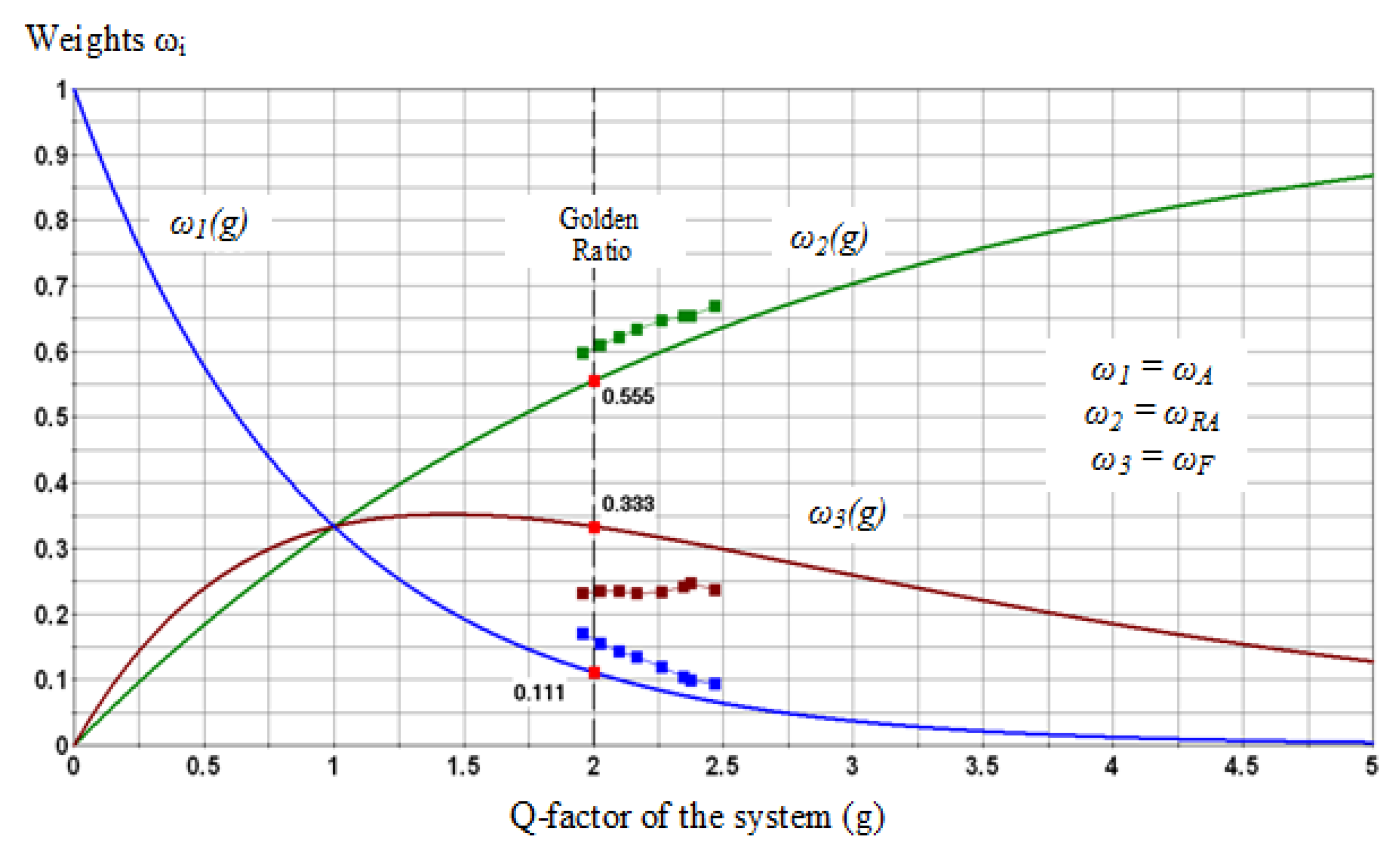
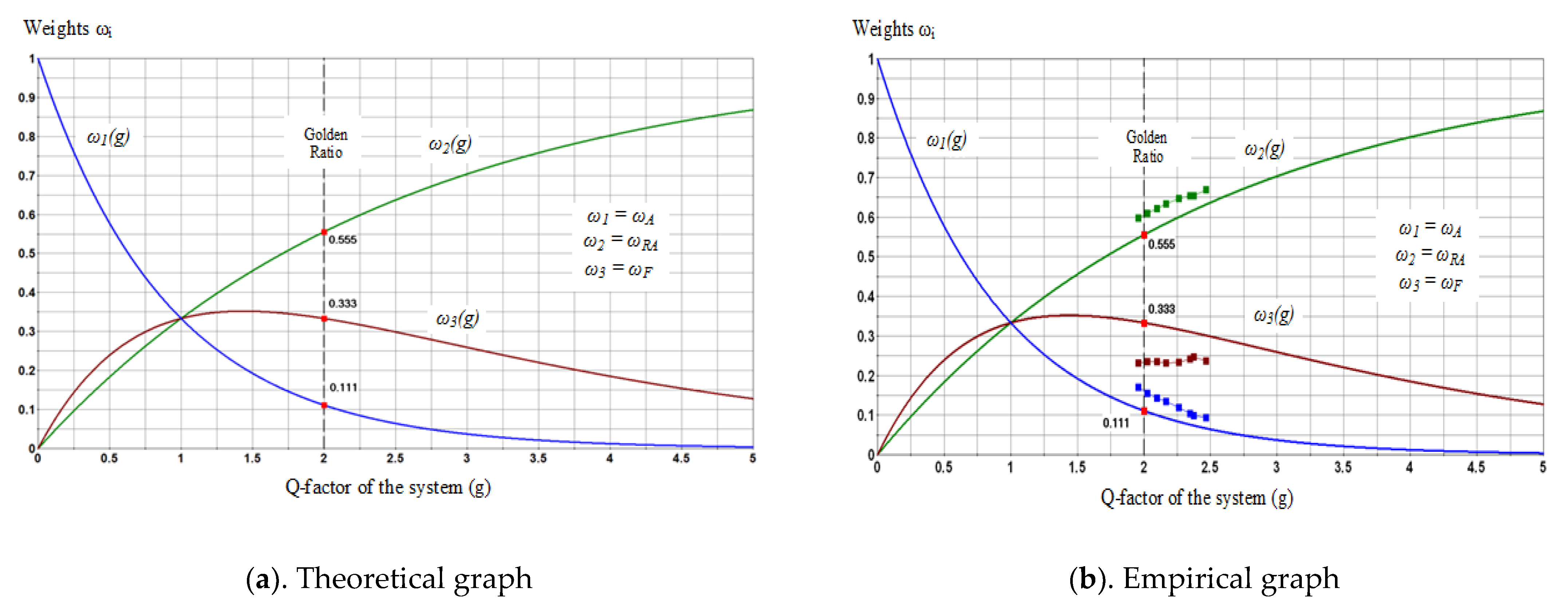
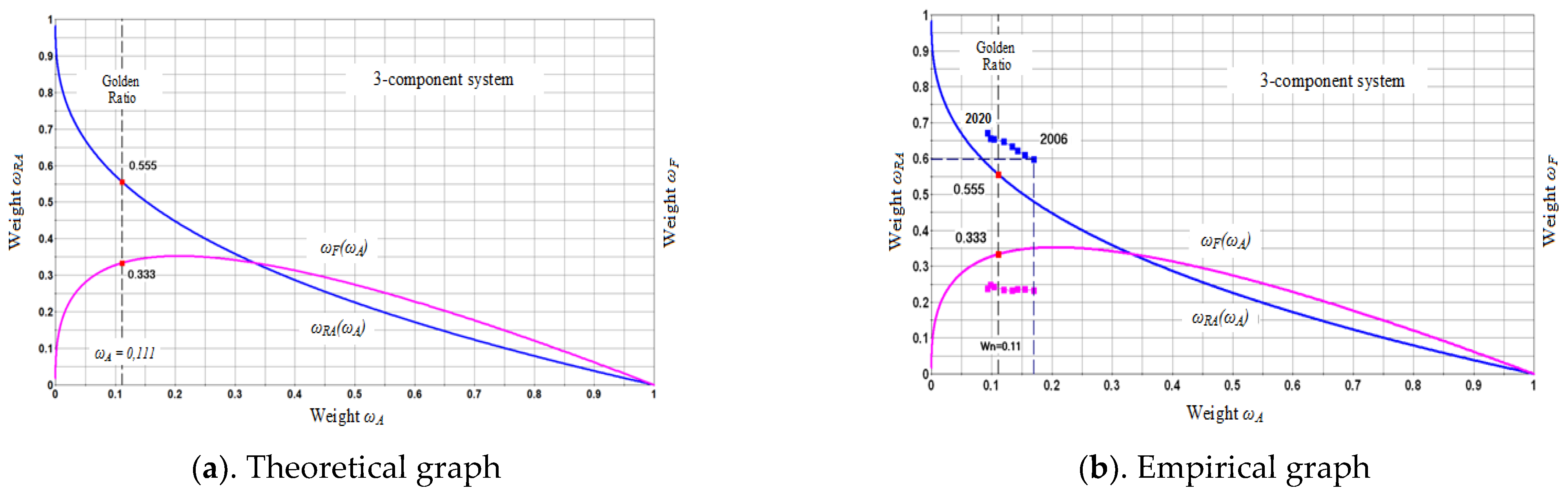
- “weights” of system components, as shown in work [124], are predetermined by the system quality factor g (43):where
- n—the number of components of the system under study;
- i—the rank of the component.
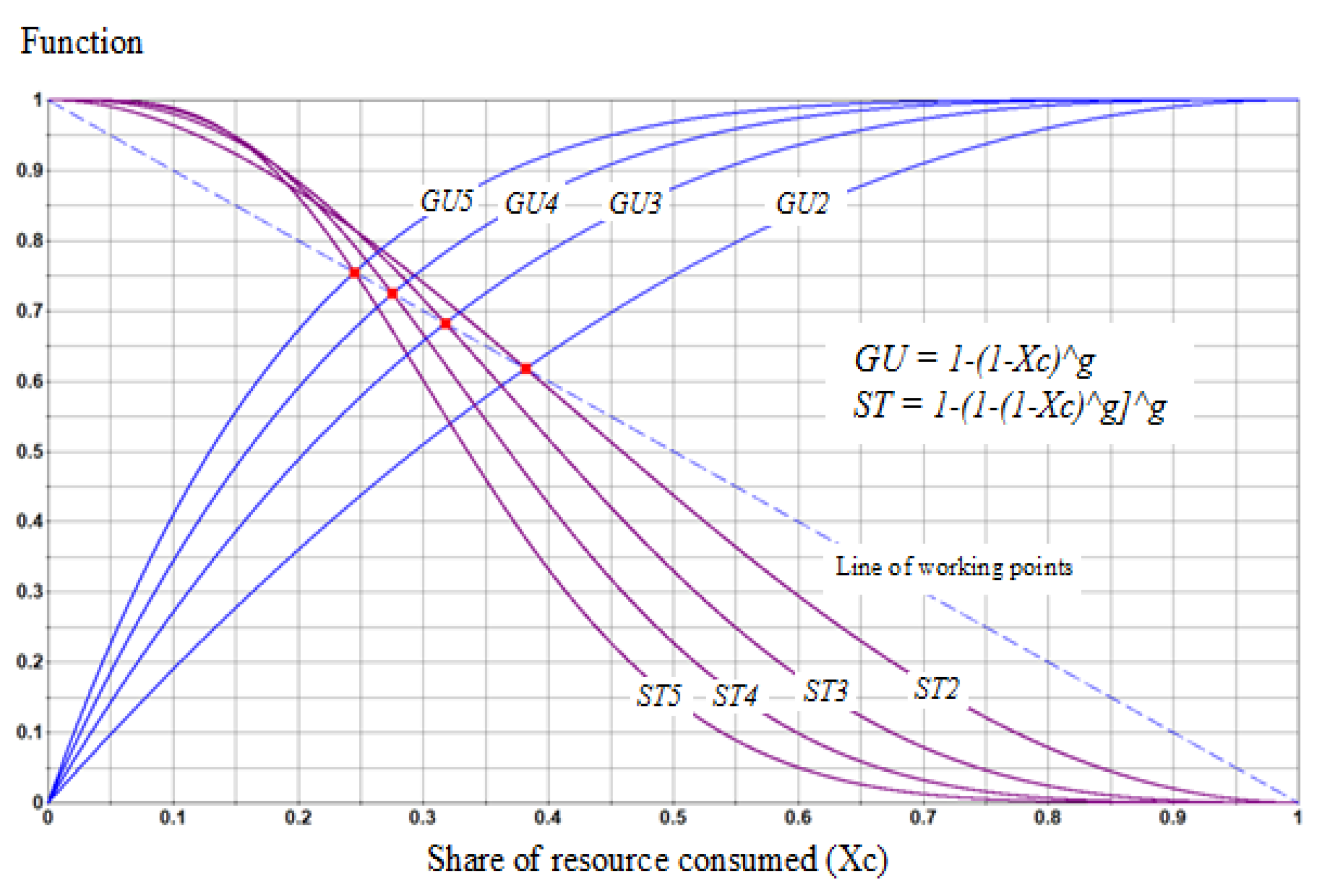
3.10. Evaluation of the Complex Systems’ Sustainability
- g—Q-factor-system quality indicator; g = s + 1.
3.11. Establishment of the Relation between System Sustainability and Its Utility
3.12. Analysis of the Possibilities of System Sustainability Application
- social;
- ecological;
- economic;
- technological (energetical);
- political.
- STi—sustainability in thei-sphere;
- —the “weight” coefficients, meeting the normalization condition .
3.13. Harmonization of Complex Systems
4. Identification of the Q-factor g of the Road Safety Provision System
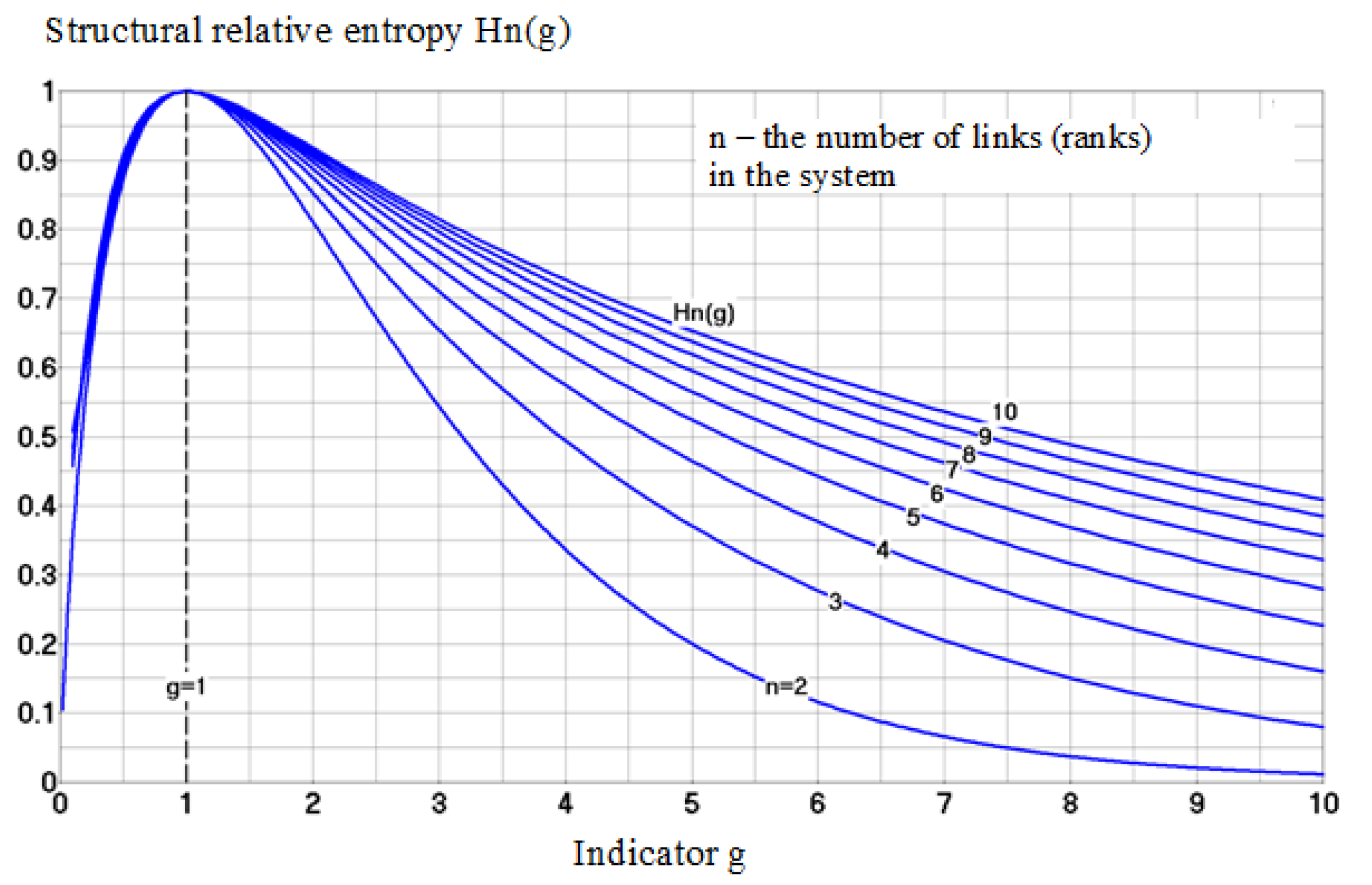
4.1. The System Orderliness and Its Relation to the System Quality Factor
4.2. Method of Definition of Relative Entropy of Road Safety Provision System
4.2.1. The Cause-and-Effect Model of Road Accident Rate Formation
- the formation of the vehicle fleet, determining the average annual intensity of road traffic (with the transfer coefficient );
- the formation of the road accidents (with the transfer coefficient );
- the formation of the deaths rate in road accidents, the number of the deceased in road accidents (with the transfer coefficient );
4.2.2. Determination of the Priorities of the Process Elements (ABC Analysis)
4.2.3. Evaluation of the “Weight” Coefficients
4.2.4. Evaluation of the Entropy as A Characteristic of the Orderliness of the Road Safety Provision System
- n—the number of system elements (in our case n = 3);
- —the “weight” coefficients, meeting the normalization condition .
- n—the number of system elements (in our case n = 3);
4.3. The Method of the Determination of the Quality Factor of the Road Safety Provision System
5. Example of the Theoretical Solution of the Problem of the Evaluation of the System Harmonicity in Relation to the Road Safety Provision System
5.1. Structural Harmony
5.2. Casual Harmony
5.3. Functional Harmony
6. Quantitative Assessment of Changes in the Road Safety System Harmonicity in the Russian Federation
6.1. Assessment of the General Trend in Changes in the Road Safety System Harmonicity in Russia from 2006 to 2020
6.2. Comparison of the Road Safety System Harmonicity in Russia during the COVID Restriction Period (2020) and during the Pre-COVID Period (2019)
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schwab, K.; Malleret, T. COVID-19. The Great Reset; World Economic Forum: Cologny, Geneva, 2020; 212p. [Google Scholar]
- TomTom Traffic Index. Available online: https://www.tomtom.com/en_gb/traffic-index/ (accessed on 9 August 2021).
- Sharifi, A.; Khavarian-Garmsir, A.R. The COVID-19 pandemic: Impacts on cities and major lessons for urban planning, design and management. Sci. Total Environ. 2020, 749, 142391. [Google Scholar] [CrossRef]
- Rutz, C.; Loretto, M.C.; Bates, A.E.; Davidson, S.C.; Duarte, C.M. COVID-19 lockdown allows researchers to quantify the effects of human activity on wildlife. Nat. Ecol. Evol. 2020, 4, 1156–1159. [Google Scholar] [CrossRef]
- Road Safety Annual Report. 2020. Available online: www.itf-oecd.org/road-safety-annual-report-2020 (accessed on 10 August 2021).
- Resolution A/RES/74/299. Improving Global Road Safety. Available online: un.org›pga/74—uploads—Resolution-Road-Safety.pdf (accessed on 10 August 2021).
- Voas, R.B.; Fell, J.C.; McKnight, A.S.; Sweedler, B.M. Controlling Impaired Driving Through Vehicle Programs: An Overview. Traffic Inj. Prev. 2004, 5, 292–298. [Google Scholar] [CrossRef]
- Amador, L.; Willis, C.J. Demonstrating a Correlation between the Maturity of Road Safety Practices and Road Safety Incidents. Traffic Inj. Prev. 2014, 15, 591–597. [Google Scholar] [CrossRef]
- Mayorov, V.I.; Sevryugin, V.E. International experience of developing complex target programs of road users’ safety. Criminol. J. Baikal Natl. Univ. Econ. Law 2015, 9, 766–776. (In Russian) [Google Scholar] [CrossRef]
- Decree of the Government of the Russian Federation of 8.01.2018, No 1-r, On Approval of the Road Safety Strategy in the Russian Federation for 2018–2024. Available online: https://docs.cntd.ru/document/556323639 (accessed on 11 August 2021).
- The Official Website of the State Traffic Inspectorate of the Russian Federation. Indicators of the State of Road Safety. Available online: http://stat.gibdd.ru/ (accessed on 11 August 2021).
- Benedict, R. Synergy: Some Notes of Ruth Benedict. Am. Anthropologist. New Ser. 1970, 72, 320–333. [Google Scholar]
- Maslow, A.H. Synergy in the Society and in the Individual. J. Individ. Psychol. 1964, 20, 153. [Google Scholar]
- Evans, P. Government action, social capital and development: Reviewing the evidence on synergy. World Dev. 1996, 24, 1119–1132. [Google Scholar] [CrossRef] [Green Version]
- Evans, P.; Berkeley, C.A. (Eds.) State-Society Synergy: Government and Social Capital in Development; Institute for International Studies: Berkeley, CA, USA, 1996. [Google Scholar]
- Hauert, C.; Michor, F.; Nowak, M.A.; Doebeli, M. Synergy and discounting of cooperation in social dilemmas. J. Theor. Biol. 2006, 239, 195–202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jaffe, K. Quantifying social synergy in insect and human societies. Behav. Ecol. Sociobiol. 2010, 64, 1721–1724. [Google Scholar] [CrossRef]
- Prigogine, I.; Stengers, I. Order out of Chaos: Man’s New Dialogue with Nature; A Bantam Book: Toronto, ON, Canada; New York, NY, USA; London, UK; Sydney, Australia, 1984; 349p. [Google Scholar]
- Prigogine, I. The philosophy of instability. Futures 1989, 21, 396–400. [Google Scholar] [CrossRef]
- Nicolis, G.; Prigogine, I. Self-Organization in Nonequilibrium Systems; John Wiley & Sons: New York, NY, USA, 1977; 491p. [Google Scholar]
- Othmer, H.G. Self-Organization in Nonequilibrium Systems (G. Nicolis and I. Prigogine). SIAM Rev. 1982, 24, 483–485. [Google Scholar] [CrossRef]
- Haken, H. The Science of Structure: Synergetics; Prentice Hall: New York, NY, USA, 1984. [Google Scholar]
- Haken, H. Synergetics: An Introduction; Springer Ser. Synergetics: Berlin/Heidelberg, Germany, 1983. [Google Scholar]
- Haken, H. Advanced Synergetics; Springer Ser. Synergetics: Berlin/Heidelberg, Germany, 1987. [Google Scholar]
- Liening, A. Synergetics—Fundamental Attributes of the Theory of Self-Organization and Its Meaning for Economics. Mod. Econ. 2014, 5, 841–847. [Google Scholar] [CrossRef] [Green Version]
- Yakimtsov, V.V. History and development of Haken’s synergetics. Sci. Bull. UNFU 2018, 28, 119–125. [Google Scholar] [CrossRef]
- Kurdyumov, S.P.; Malinetskii, G.G. Synergetics-Theory of Self-Organization. Ideas, Methods, Perspectives; Nauka: Moscow, Russia, 1983; 280p. (In Russian) [Google Scholar]
- Kurdyumov, S.P.; Malinetskii, G.G. Prologue. Synergetics and System Synthesis. Looking to the Third Millennium; Nauka: Moscow, Russia, 2002; 420p. (In Russian) [Google Scholar]
- Soroko, E.M. Golden Sections, Processes of Self-Organization and Evolution of Systems: An Introduction to the General Theory of Harmony of Systems, 4rd ed.; Book House “Librocom”: Moscow, Russia, 2012; 264p. (In Russian) [Google Scholar]
- Gordon, J.E. The epidemiology of accidents. Am. J. Public Health 1949, 39, 504–515. [Google Scholar] [CrossRef] [Green Version]
- Gibson, J.J. The Contribution of Experimental Psychology to the Formulation of the Problem of Safety—A Brief for Basic Research. Behavioural Approaches to Accident Research; Assoc. for the Aid of Crippled Children: New York, NY, USA, 1961; pp. 77–89. [Google Scholar]
- Haddon, W. The changing approach to the epidemiology, prevention, and amelioration of trauma: The transition to approaches etiologically rather than descriptively based. Am. J. Public Health 1968, 58, 1431–1438. [Google Scholar] [CrossRef]
- Haddon, W. A logical framework for categorizing highway safety phenomena and activity. J. Trauma 1972, 12, 193–207. [Google Scholar] [CrossRef] [PubMed]
- Haddon, W. Energy damage and 10 countermeasure strategies. J. Trauma Inj. Infect. Crit. Care 1973, 13, 321–331. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haddon, W. Options for the prevention of motor vehicle crash injury. Isr. J. Med. Sci. 1980, 16, 45–65. [Google Scholar]
- Von Bertalanffy, L. General System Theory: Foundations, Development, Applications; Penguin: London, UK, 1968. [Google Scholar]
- Johansson, R. Vision Zero—Implementing a policy for traffic safety. Saf. Sci. 2009, 47, 826–831. [Google Scholar] [CrossRef]
- Larsson, P.; Dekker, S.W.; Tingvall, C. The need for a systems theory approach to road safety. Saf. Sci. 2010, 48, 1167–1174. [Google Scholar] [CrossRef]
- Szymanek, A. System Approach in Road Safety Studies. Commun. Sci. Lett. Univ. Zilina 2020, 22, 201–210. [Google Scholar] [CrossRef]
- Hughes, B.P.; Newstead, S.; Anund, A.; Shu, C.C.; Falkmer, T. A review of models relevant to road safety. Accid. Anal. Prev. 2015, 74, 250–270. [Google Scholar] [CrossRef] [Green Version]
- Smeed, R.J. Some statistical aspects of road safety research. J. R. Stat. Soc. 1949, 12, 1–34. [Google Scholar] [CrossRef]
- Haight, F.A. Traffic safety in developing countries. J. Saf. Res. 1980, 12, 50–58. [Google Scholar] [CrossRef]
- Jacobs, G.D.; Cutting, C.A. Further research on accident rates in developing countries. Accid Anal. Prev. 1986, 18, 119–127. [Google Scholar] [CrossRef]
- Nicholson, A.J.; Jadaan, K.S. A review of recent developments and current issues in road safety. J. Traffic Med. 1989, 17, 13–22. [Google Scholar]
- Zwi, A.B.; Forjouh, S.; Murugusamphillay, S. Injuries in developing countries: Policy response needed now. Trans. R. Soc. Trop. Med. Hyg. 1996, 90, 593–595. [Google Scholar] [PubMed] [Green Version]
- Murray, C.J.L.; Lopez, A.D. Mortality by cause for eight regions of the World: Global burden of disease Study. Lancet 1997, 349, 1269–1276. [Google Scholar] [CrossRef]
- Bener, A.; Abu-Zidan, F.M.; Bensiali, A.K.; Al-Mulla, A.A.; Jadaan, K.S. Strategy to improve road safety in developing countries. Saudi Med. J. 2003, 24, 603–608. [Google Scholar] [PubMed]
- Belin, M.-Å.; Tillgren, P.; Vedung, E. Vision Zero—A road safety policy innovation. Int. J. Inj. Control Saf. Promot. 2012, 19, 171–179. [Google Scholar] [CrossRef] [Green Version]
- Haagsma, J.A.; Graetz, N.; Bolliger, I.; Naghavi, M.; Higashi, H.; Mullany, E.C.; Abera, S.F.; Abraham, J.P.; Adofo, K.; Alsharif, U.; et al. The global burden of injury: Incidence, mortality, disability-adjusted life years and time trends from the Global Burden of Disease study 2013. Inj. Prev. 2016, 22, 3–18. [Google Scholar] [PubMed] [Green Version]
- Goniewicz, K.; Goniewicz, M.; Pawłowski, W.; Fiedor, P. Road accident rates: Strategies and programmes for improving road traffic safety. Eur. J. Trauma Emerg. Surg. 2016, 42, 433–438. [Google Scholar] [CrossRef]
- Beck, B.; Cameron, P.A.; Fitzgerald, M.C.; Judson, R.T.; Teague, W.; Lyons, R.A.; Gabbe, B.J. Road safety: Serious injuries remain a major unsolved problem. Med. J. Aust. 2017, 207, 244–249. [Google Scholar] [CrossRef] [PubMed]
- WHO. Available online: https://www.who.int/ (accessed on 13 August 2021).
- Website of the International Traffic Safety Data and Analysis Group (IRTAD). Available online: https://www.itf-oecd.org/IRTAD (accessed on 14 August 2021).
- Elvik, R.; Goel, R. Safety-in-numbers: An updated meta-analysis of estimates. Accid. Anal. Prev. 2019, 129, 136–147. [Google Scholar] [CrossRef]
- WHO. Global Status Report on Road Safety, Geneva. 2015. Available online: http://www.who.int/violence_injury_prevention/road_traffic/en/ (accessed on 15 August 2021).
- Blinkin, M.Y.; Reshetova, E.M. Road Safety: The History of the Issue, International Experience, Basic Institutions; Publishing House of the Higher School of Economics: Moscow, Russia, 2013; 240p. (In Russian) [Google Scholar]
- Wijnen, W.; Weijermars, W.; Schoeters, A.; van den Berghe, W.; Bauer, R.; Carnis, L.; Elvik, R.; Martensen, H. An analysis of official road crash cost estimates in European countries. Saf. Sci. 2019, 113, 318–327. [Google Scholar] [CrossRef]
- Blincoe, L.J.; Miller, T.R.; Zaloshnja, E.; Lawrence, B.A. The Economic and Societal Impact of Motor Vehicle Crashes, 2010; (Revised) (Report No. DOT HS 812 013); National Highway Traffic Safety Administration: Washington, DC, USA, 2015. [Google Scholar]
- Kato, S.; Takeuchi, E.; Ishiguro, Y.; Ninomiya, Y.; Takeda, K.; Hamada, T. An Open Approach to Autonomous Vehicles. IEEE Micro 2015, 35, 60–68. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Bonnefon, J.-F.; Shariff, A.; Rahwan, I.Y. The social dilemma of autonomous vehicles. Science 2016, 352, 1573–1576. [Google Scholar] [CrossRef] [Green Version]
- Faisal, A.; Kamruzzaman, M.; Yigitcanlar, T.; Currie, G. Understanding autonomous vehicles: A systematic literature review on capability, impact, planning and policy. J. Transp. Land Use 2019, 12, 45–72. [Google Scholar] [CrossRef] [Green Version]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Khadaroo, J.; & Seetanah, B. The Role of Transport Infrastructure in International Tourism Development: A Gravity Model Approach. Tour. Manag. 2008, 29, 831–840. [Google Scholar] [CrossRef]
- Kolik, A.; Radziwill, A.; Turdyeva, N. Improving Transport Infrastructure in Russia. In OECD Economics Department Working Papers; No. 1193; OECD Publishing: Paris, France, 2015. [Google Scholar] [CrossRef]
- Qin, Y. China’s Transport Infrastructure Investment: Past, Present, and Future. Asian Econ. Policy Rev. 2016, 11, 199–217. [Google Scholar] [CrossRef]
- Hamed, M.M. Analysis of pedestrians’ behavior at pedestrian crossings. Saf. Sci. 2001, 38, 63–82. [Google Scholar] [CrossRef]
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef] [Green Version]
- Van den Elshout, S.; Molenaar, R.; Wester, B. Adaptive traffic management in cities—Comparing decision-making methods. Sci. Total Environ. 2014, 488–489, 382–388. [Google Scholar] [CrossRef]
- Wouters, P.I.J.; Bos, J.M.J. Traffic accident reduction by monitoring driver behaviour with in-car data recorders. Accid. Anal. Prev. 2000, 32, 643–650. [Google Scholar] [CrossRef]
- Warner, H.W.; Åberg, L. Drivers’ decision to speed: A study inspired by the theory of planned behavior. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 427–433. [Google Scholar] [CrossRef]
- Taubman-Ben-Ari, O.; Mikulincer, M.; Gillath, O. The multidimensional driving style inventory—Scale construct and validation. Accid. Anal. Prev. 2004, 36, 323–332. [Google Scholar] [CrossRef]
- Burger, J.M.; Cooper, H.M. The desirability of control. Motiv. Emot. 1979, 3, 381–393. [Google Scholar] [CrossRef]
- Zuckerman, M.; Kuhlman, D.M.; Joireman, M.; Kraft, H. Five robust questionnaire scale factors of personality without culture. Personal. Individ. Differ. 1993, 12, 929–941. [Google Scholar] [CrossRef]
- Poó, F.; Taubman-Ben-Ari, O.; Ledesma, R.; Díaz-Lázaro, C. Reliability and validity of a Spanish-language version of the multidimensional driving style inventory. Transp. Res. Part F Traffic Psychol. Behav. 2013, 17, 75–87. [Google Scholar] [CrossRef]
- Holman, A.; Havârneanu, C. The Romanian version of the multidimensional driving style inventory: Psychometric properties and cultural specificities. Transp. Res. Part F Traffic Psychol. Behav. 2015, 35, 45–59. [Google Scholar] [CrossRef]
- Totkova, Z.; Racheva, R. The Bulgarian Version of the Multidimensional Driving Style Inventory: Psychometric Properties. Behav. Sci. 2019, 9, 145. [Google Scholar] [CrossRef] [Green Version]
- Evans, L. Risks older drivers face themselves and threats they pose to other road users. Int. J. Epidemiol. 2000, 29, 315–322. [Google Scholar] [CrossRef] [Green Version]
- Bernhoft, I.M.; & Carstensen, G. Preferences and behaviour of pedestrians and cyclists by age and gender. Transp. Res. Part F Traffic Psychol. Behav. 2008, 11, 83–95. [Google Scholar] [CrossRef]
- Gonawala, R.J.; Badami, N.B.; Electicwala, F.; Kumar, R. Impact of Elderly Road Users Characteristics at Intersection. Procedia Soc. Behav. Sci. 2013, 104, 1088–1094. [Google Scholar] [CrossRef] [Green Version]
- Zaidel, D.M. A modeling perspective on the culture of driving. Accid. Anal. Prev. 1992, 24, 585–597. [Google Scholar] [CrossRef]
- Guldenmund, F.W. The nature of safety culture: A review of theory and research. Saf. Sci. 2000, 34, 215–257. [Google Scholar]
- Zhang, W.; Huang, Y.; Roetting, M.; Wang, Y.; Wei, H. Driver’s views and behaviours about safety in China: What do they not know about driving? Accid. Anal. Prev. 2006, 38, 22–27. [Google Scholar] [PubMed]
- Özkan, T.; Lajunen, T. Person and Environment. In Handbook of Traffic Psychology; Porter, B.E., Waltham, M.A., Eds.; Academic Press: London, UK, 2011; pp. 179–192. [Google Scholar] [CrossRef]
- Gaygisiz, E. Cultural values and governance quality as correlates of road traffic fatalities: A nation level analysis. Accid. Anal. Prev. 2010, 42, 1894–1901. [Google Scholar]
- Horne, J.A.; Reyner, L.A. Sleep related vehicle accidents. BMJ 1995, 310, 565–567. [Google Scholar] [PubMed] [Green Version]
- Strohl, K.P. Sleep apnea, sleepiness, and driving risk. Am. J. Respir. Crit. Care Med. 1994, 150, 1463. [Google Scholar]
- Bell, M.G.H. Policy issues for the future intelligent road transport infrastructure. IEE Proc. Intell. Transp. Syst. 2006, 153, 147. [Google Scholar] [CrossRef] [Green Version]
- Losurdo, F.; Dileo, I.; Siergiejczyk, M.; Krzykowska, K.; Krzykowski, M. Innovation in the ICT Infrastructure as a Key Factor in Enhancing Road Safety: A Multi-sectoral Approach. In Proceedings of the 2017 25th International Conference on Systems Engineering (ICSEng), Las Vegas, NV, USA, 22–24 August 2017; pp. 157–162. [Google Scholar] [CrossRef]
- Hegyi, P.; Borsos, A.; Koren, C. Searching possible accident black spot locations with accident analysis and gis software based on GPS coordinates. Pollack Period 2017, 12, 129–140. [Google Scholar] [CrossRef]
- Dereli, M.A.; Erdogan, S. A new model for determining the traffic accident black spots using GIS-aided spatial statistical methods. Transp. Res. Part A Policy Pract. 2017, 103, 106–117. [Google Scholar]
- Al-Jameel, H.A.; AbdAbas, A.Y. Identifying black spot locations at karbala city by using GIS system. Int. J. Civ. Eng. 2018, 9, 933–938. [Google Scholar]
- Shen, L.; Lu, J.; Long, M.; Chen, T. Identification of accident blackspots on rural roads using grid clustering and principal component clustering. Math. Probl. Eng. 2019, 2019, 2151284. [Google Scholar] [CrossRef]
- Bisht, L.S.; Tiwari, G. Assessing the Black Spots Focused Policies for Indian National Highways. Transp. Res. Procedia 2019, 48, 2537–2549. [Google Scholar] [CrossRef]
- Vindhya Shree, M.P.; Shashikiran, C.R.; Nandish Shanabog, C.S. Prioritization of Accident Black Spots using GIS. Int. J. Eng. Res. 2020, 9, 653–666. [Google Scholar] [CrossRef]
- Yuan, T.; Zeng, X.; Shi, T. Identifying Urban road black spots with a novel method based on the firefly clustering algorithm and a geographic information system. Sustainability 2020, 12, 2091. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Wang, K.; Zhang, Y.; Shi, Q. Identification of black spots on highways using fault tree analysis and vehicle safety boundaries. J. Transp. Saf. Secur. 2021, 13, 46–68. [Google Scholar] [CrossRef]
- Almoshaogeh, M.; Abdulrehman, R.; Haider, H.; Alharbi, F.; Jamal, A.; Alarifi, S.; Shafiquzzaman, M. Traffic Accident Risk Assessment Framework for Qassim, Saudi Arabia: Evaluating the Impact of Speed Cameras. Appl. Sci. 2021, 11, 6682. [Google Scholar] [CrossRef]
- European Accident Research and Safety Report. 2017. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/statistics/dacota/asr2017.pdf (accessed on 18 August 2021).
- European Accident Research and Safety Report. 2018. Available online: https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/statistics/dacota/asr2018.pdf (accessed on 18 August 2021).
- Thiffault, P.; Bergeron, J. Monotony of road environment and driver fatigue: A simulator study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef]
- Saneinejad, S.; Roorda, M.J.; Kennedy, C. Modelling the impact of weather conditions on active transportation travel behaviour. Transp. Res. Part D Transp. Environ. 2012, 17, 129–137. [Google Scholar] [CrossRef] [Green Version]
- Chu, W.; Wu, C.; Atombo, C.; Zhang, H.; Özkan, T. Traffic climate, driver behaviour, and accidents involvement in China. Accid. Anal. Prev. 2019, 122, 119–126. [Google Scholar] [CrossRef]
- Horowitz, R.; Varaiya, P. Control design of an automated highway system. Proc. IEEE 2000, 88, 913–925. [Google Scholar] [CrossRef]
- Giannopoulos, G. The application of information and communication technologies in transport. Eur. J. Oper. Res. 2004, 152, 302–320. [Google Scholar] [CrossRef]
- Hamdi, S.; Faiedh, H.; Souani, C.; Besbes, K. Road signs classification by ANN for real-time implementation. In Proceedings of the 2017 International Conference on Control, Automation and Diagnosis (ICCAD), Hammamet, Tunisia, 19–21 January 2017; pp. 328–332. [Google Scholar] [CrossRef]
- Michon, J.A. A Critical View of Driver Behavior Models: What Do We Know, What Should We Do? In Human Behavior and Traffic Safety; Evans, L., Schwing, R.C., Eds.; Springer: Boston, MA, USA, 1985. [Google Scholar]
- Dingil, A.E.; Esztergár-Kiss, D. The Influence of the Covid-19 Pandemic on Mobility Patterns: The First Wave’s Results. Transp. Lett. 2021, 13, 434–446. [Google Scholar] [CrossRef]
- Cho, S.-H.; Park, H.-C. Exploring the Behaviour Change of Crowding Impedance on Public Transit due to COVID-19 Pandemic: Before and After Comparison. Transp. Lett. 2021, 13, 367–374. [Google Scholar] [CrossRef]
- Velmurugan, S.; Mukti, A.; Padma, S. Impacts of COVID-19 on the Transport Sector and Measures as Well as Recommendations of Policies and Future Research: Report on India. 27 September 2020. [CrossRef]
- Catchpole, J.; Naznin, F. Impact of COVID-19 on Road Crashes in Australia. Available online: https://www.arrb.com.au/latest-research/report-reveals-facts-about-covid-19-lockdown-road-crashes (accessed on 16 August 2021).
- Katrakazas, C.; Michelaraki, E.; Sekadakis, M.; Yannis, G. A descriptive analysis of the effect of the COVID-19 pandemic on driving behavior and road safety. Transp. Res. Interdiscip. Perspect. 2020, 7, 100186. [Google Scholar] [CrossRef]
- Budd, L.; Ison, S. Responsible transport: A post-COVID agenda for transport policy and practice. Transp. Res. Interdiscip. Perspect. 2020, 6, 100151. [Google Scholar] [CrossRef]
- Kolesov, V.I. Dynamic characteristics of the innovation process based on the generalized golden section. In Innovations in the Management of Regional and Sectoral Development; TIU: Tyumen, Russia, 2019; pp. 121–127. (In Russian) [Google Scholar]
- Soroko, E.M. Structural Harmony of Systems; Science and Technology: Minsk, Belarus, 1984; 264p. (In Russian) [Google Scholar]
- Soroko, E.M. The Criterion of Harmony of Self-Organizing Socio-Natural Systems; Scientific Report; Institute of the Noosphere of the Far Eastern Branch of the USSR Academy of Sciences: Vladivostok, Russia, 1989; 83p. (In Russian) [Google Scholar]
- Kolesov, V.I. Criterion of system harmony. In New Information Technologies in the Oil and Gas Industry and Education; TIU: Tyumen, Russia, 2019; pp. 206–212. (In Russian) [Google Scholar]
- Shastova, G.A. Choice and Optimization of the Structure of Information Systems; Energia: Moscow, Russia, 1972; 256p. (In Russian) [Google Scholar]
- Prangishvili, I.V. Problems of effective management of complex socio-economic and organizational systems. Prop. Relat. Russ. Fed. 2006, 11, 82–86. (In Russian) [Google Scholar]
- Ivanus, A.I. Fundamentals of Harmonious Management (the Concept of F-Technology); V.A. Trapeznikov’s Institute of Management Problems, RAS: Moscow, Russia, 2004; 82p. (In Russian) [Google Scholar]
- Kornai, Y. System paradigm. Soc. Econ. 1999, 3–4, 85–96. (In Russian) [Google Scholar]
- Stepin, V.S. Self-developing systems and post-non-classical rationality. Quest. Philos. 2003, 8, 5–17. (In Russian) [Google Scholar]
- Kleiner, G.B. System paradigm and system management. Russ. J. Manag. 2008, 6, 27–50. (In Russian) [Google Scholar]
- Kolesov, V.I. Reference systems in the metric of the generalized golden s-section. In New Information Technologies in the Oil and Gas Industry and Education; TIU: Tyumen, Russia, 2020; pp. 11–17. (In Russian) [Google Scholar]
- Popov, S.A. The Concept of Actual Strategic Management for Modern Russian Companies; Yurayt Publishing House: Moscow, Russia, 2020; 223p. (In Russian) [Google Scholar]
- Drucker, P.F. The theory of business. Harv. Bus. Rev. 1994, 72, 95–104. [Google Scholar]
- Krutov, V.I.; Glushko, I.M.; Popov, V.V. Fundamentals of Scientific Research; Higher School: Moscow, Russia, 1989; 400p. (In Russian) [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Determination Algorithm | |
|---|---|---|
| Normalized speed of the change of process utility SGUn | ,
. | (10) |
| Normalized process general utility GUn | (11) | |
| Normalized vital power (performance) of process VPn | (12) | |
| Normalized reserve of process vital power Sn | (13) |
| Road Safety Indicators | Numerical Values of Indicators By Year | |||||||
|---|---|---|---|---|---|---|---|---|
| 2006 | 2008 | 2010 | 2012 | 2014 | 2016 | 2018 | 2020 | |
| Number of accidents, units | 228,309 | 217,557 | 199,083 | 203,597 | 199,720 | 173,694 | 168,099 | 137,662 |
| The number of people killed in accidents, deceased people | 32,724 | 29,936 | 26,567 | 27,991 | 26,963 | 20,308 | 18,214 | 15,788 |
| Characteristic | Numerical Values of Indicators By Year | |||||||
|---|---|---|---|---|---|---|---|---|
| 2006 | 2008 | 2010 | 2012 | 2014 | 2016 | 2018 | 2020 | |
| Relative entropy of the road safety system Hn RSS | 0.862 | 0.847 | 0.831 | 0.817 | 0.797 | 0.780 | 0.775 | 0.755 |
| Q-factor of the road safety system g | 1.956 | 2.027 | 2.098 | 2.166 | 2.262 | 2.346 | 2.374 | 2.465 |
| Characteristic | Numerical Values of Indicators By Year | |||||||
|---|---|---|---|---|---|---|---|---|
| 2006 | 2008 | 2010 | 2012 | 2014 | 2016 | 2018 | 2020 | |
| 0.170 | 0.155 | 0.143 | 0.134 | 0.120 | 0.104 | 0.098 | 0.093 | |
| 0.598 | 0.610 | 0.622 | 0.633 | 0.647 | 0.654 | 0.655 | 0.670 | |
| 0.232 | 0.235 | 0.235 | 0.232 | 0.233 | 0.242 | 0.247 | 0.237 | |
| Indicator | Numerical Values of Indicators By Year | ||||
|---|---|---|---|---|---|
| 2016 | 2017 | 2018 | 2019 | 2020 | |
| The number of penalties, mln. units | 87.1 | 108.7 | 131.3 | 142.1 | 167.0 |
| Of these, for violation of the speed limit, mln. units | 54.0 | 74.4 | 92.2 | 101.8 | 124.0 |
| The share of speed limit violations in the total number of violations, % | 62.0 | 68.4 | 70.2 | 71.6 | 74.2 |
| Characteristic | Numerical Values of Indicators By Year | |||||||
|---|---|---|---|---|---|---|---|---|
| 2006 | 2008 | 2010 | 2012 | 2014 | 2016 | 2018 | 2020 | |
| Normalized general utility | 0.615 | 0.620 | 0.626 | 0.631 | 0.639 | 0.644 | 0.646 | 0.652 |
| Year | Population of Russian Federation (on 1 January the Following Year), People | The Average Annual Number of the Fleet of Vehicles of the Russian Federation, Units | Annual Number of Road Accidents in the Russian Federation, Case/Year | The Annual Number of Deaths in Road Accidents in the Russian Federation, Deceased/Year |
|---|---|---|---|---|
| 2019 | 146,748,590 | 61,739,156 | 164,358 | 16,981 |
| 2020 | 146,171,015 | 62,721,765 | 137,662 | 15,788 |
| Absolute change, unit | ||||
| Δ2020/2019 | −577,575 | +982,609 | −26,696 | −1193 |
| Relative change, % | ||||
| Δ2020/2019, % | −0.39 | +1.59 | −16.25 | −7.02 |
| Numerical Values of the Elements of the Three-Link Mechanism of Informational Transformation of the Road Safety System in the Russian Federation, 2019 | |||
|---|---|---|---|
| Y1 – Country population | Y2 – Size of vehicle fleet | Y3 – Annual number of road accidents | Y4 – Annual number of deaths in road accidents |
| 146,748,590 | 61,739,56 | 164,358 | 16,981 |
| numerical values | |||
| KA | KRA | KF | |
| 61,739,156/146,748,590 = 0.4207 | 164,358/61,739,156 = 0.0026 | 16,981/164,358 = 0.1033 | |
| 0.8658 | 5.9286 | 2.2700 | |
| 0.096 | 0.654 | 0.250 | |
| −2.3485 | −0.4246 | −1.3846 | |
| −0.2243 | −0.2777 | −0.3467 | |
| Numerical value of absolute entropy H RSS RF = 0.8487 | |||
| Numerical value of relative entropy Hn RSS RF = 0.7726 | |||
| Numerical Values of the Elements of the Three-Link Mechanism of Informational Transformation of the Road Safety System in the Russian Federation, 2020 | |||
|---|---|---|---|
| Y1 – Country population | Y2 – Number of vehicle fleet | Y3 – Annual number of road accidents | Y4 – Annual number of deaths in road accidents |
| 146,171,015 | 62,721,765 | 137,662 | 15,788 |
| numerical values | |||
| KA | KRA | KF | |
| 62,721,765/146,171,015 = 0.4291 | 137,662/62,721,765 = 0.0022 | 15,788/137,662 = 0.1147 | |
| 0.8461 | 6.1217 | 2.1656 | |
| 0.093 | 0.670 | 0.237 | |
| −2.34791 | −0.4001 | −1.4393 | |
| −0.2204 | −0.2682 | −0.3413 | |
| Numerical value of absolute entropy H RSS RF = 0.8298 | |||
| Numerical value of relative entropy Hn RSS RF = 0.7553 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petrov, A.I.; Kolesov, V.I.; Petrova, D.A. Theory and Practice of Quantitative Assessment of System Harmonicity: Case of Road Safety in Russia before and during the COVID-19 Epidemic. Mathematics 2021, 9, 2812. https://doi.org/10.3390/math9212812
Petrov AI, Kolesov VI, Petrova DA. Theory and Practice of Quantitative Assessment of System Harmonicity: Case of Road Safety in Russia before and during the COVID-19 Epidemic. Mathematics. 2021; 9(21):2812. https://doi.org/10.3390/math9212812
Chicago/Turabian StylePetrov, Artur I., Victor I. Kolesov, and Daria A. Petrova. 2021. "Theory and Practice of Quantitative Assessment of System Harmonicity: Case of Road Safety in Russia before and during the COVID-19 Epidemic" Mathematics 9, no. 21: 2812. https://doi.org/10.3390/math9212812